|
仭2.丂墦妘忣曬廂廤僙儞僔儞僌僔僗僥儉
丂僙儞僔儞僌僔僗僥儉偵偼丆墦妘忣曬廂廤偵偦偺栚揑傪尷掕偟偰傕丆側偍懡偔偺庬椶偺僔僗僥儉偑偁傞偑丆偦偺曽幃偼師偺3庬椶偵戝暿偡傞偙偲偑偱偒傞丏
丂(倎)丂僷僢僔僽僙儞僔儞僌僔僗僥儉
丂僙儞僔儞僌懳徾偺壏搙丒昞柺忬懺摍偦偺忬懺偵墳偠偰帺傜敪惗偡傞怣崋傪庴怣偡傞丏捠忢怣崋嫮搙偺傒偱埵憡忣曬偼摼傜傟側偄丏
丂(倐)丂傾僋僥傿僽僀儞僐僸乕儗儞僩僙儞僔儞僌僔僗僥儉
丂儔儞僟儉側埵憡乮敀怓岝丆帺椼敪怳宆僷儖僗尮摍乯偺憲怣宯偲庴怣宯傪帩偮僔僗僥儉偱丆僙儞僔儞僌懳徾偐傜偺斀幩乮嶶棎乯攇傪庴怣偡傞丏懳徾偺忬懺偵墳偠偰憲怣宯傪惂屼偟丆怣崋偺嫮搙媦傃偦偺暘晍傪搒崌偺椙偄忬懺偱庴怣偡傞偙偲偑偱偒傞偑丆捠忢怣崋偺埵憡忣曬偼摼傜傟側偄丏
(們)丂傾僋僥傿僽僐僸乕儗儞僩僙儞僔儞僌僔僗僥儉(3)
丂僐僸乕儗儞僩側憲怣尮乮埵憡忣曬偑妶梡偱偒傞儗乕僓丆儅僀僋儘攇敿摫懱摍乯偲庴怣宯傪帩偮僔僗僥儉偱丆僙儞僔儞僌懳徾偐傜偺斀幩乮嶶棎乯攇傪庴怣偡傞丏懳徾偺忬懺偵墳偠偰憲怣尮傪惂屼偟丆怣崋偺埵憡忣曬丆嫮搙丆嫮搙暘晍丆帪娫抶墑丆廃攇悢曃堏摍偺忣曬傪摼傞偙偲偑偱偒傞丏偟偨偑偭偰怣崋偺揔墳揑僼傿儖僞儕儞僌丆奐岥崌惉張棟丆堏摦懱偺僩儔僢僉儞僌摍條乆側怣崋張棟媄弍傪嬱巊偡傞偙偲偵傛傝懳徾偺傛傝徻嵶側忣曬廂廤偑壜擻偱偁傞丏
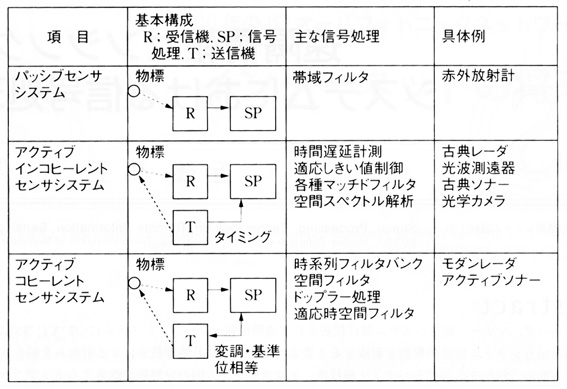
丂埲忋偵偮偄偰婎杮峔惉傗墳梡椺摍傪昞1偵傑偲傔偰偍偔丏偙傟傜偺僙儞僔儞僌僔僗僥儉偺偆偪偱怣崋張棟媄弍傪妶梡偟偰僙儞僔儞僌懳徾偺忣曬偑朙晉偵摼傜傟傞偺偼丆傕偪傠傫傾僋僥傿僽僙儞僔儞僌僔僗僥儉偱偁傞丏埲壓攇摦怣崋傪棙梡偡傞墦妘忣曬廂廤僔僗僥儉偱丆傾僋僥傿僽僙儞僔儞僌傪慜採偵偟偨怣崋張棟媄弍偵偮偄偰弎傋傞丏
丂
昞侾丂墦妘忣曬僙儞僔儞僌僔僗僥儉偺暘椶
丂
丂傾僋僥傿僽僙儞僔儞僌僔僗僥儉偼丆懡偔偺応崌恾1偵帵偡傛偆偵丆憲怣尮偐傜敪幩偝傟偨揹攇丆岝攇丆壒攇摍偺價乕儉傪憱嵏偟側偑傜僙儞僔儞僌懳徾嬻娫偵徠幩偟偰丆偦偺斀幩乮嶶棎乯攇傪庴怣夝愅偡傞偲偄偆曽朄傪偲傞丏偙偺嵺丆
丂嘆丂栚揑傗専弌懳徾偺庬椶偵傛傝憲怣價乕儉妏偲庴怣價乕儉妏偑堎側傞
丂嘇丂暘夝擻僙儖偺宍惉朄偑條乆偱偁傞
丂嘊丂僾儔僢僩儂乕儉傗僙儞僔儞僌懳徾偑堏摦偡傞

恾侾丂傾僋僥傿僽僙儞僔儞僌僔僗僥儉偺價乕儉憱嵏偲暘夝擻僙儖
|